UM Tracked Vehicle

Моделирование динамики гусеничных машин

Модуль UM Tracked Vehicle разработан для автоматизации процесса создания моделей гусеничных машин и анализа их динамики. UM Tracked Vehicle содержит следующие инструменты:
- автоматический генератор гусеничного движителя с помощью библиотеки основных компонент,
- возможность расширения пользователем библиотеки компонент,
- динамический анализ гусеничных машин с использованием набора тестов.
Стандартные компоненты базы данных
Модуль UM для моделирования гусеничных машин состоит из двух основных частей. Первая часть – это автоматический генератор модели ходовой части гусеничной машины в виде систем тел, вторая часть генерирует и решает уравнения движения гусеничной машины.
Генератор гусеничного движителя содержит как стандартные, так и созданные пользователем компоненты
- опорные катки с системой подвески,
- ведущее колесо,
- направляющее колесо с натяжным механизмом,
- поддерживающие катки,
- звенья гусеничной цепи с различными типами шарниров,
- профили зубьев ведущего колеса и цевок для точного расчета их контактного взаимодействия.
| Ведущие колеса |
 |
|
| Огибающая кривая как шаблон для построения модели гусеничного обвода |
|
|
Положения центров катков и их радиусы используются для построения огибающей кривой с целью генерирования траков в их точных положениях.

Модели контактных взаимодействий
Динамическая модель гусеничной машины включает контактные взаимодействия нескольких типов.
Взаимодействие колеса и грунта
Расчет нормальной силы в контакте опорного, поддерживающего катка или направляющего колеса со звеном гусеничной цепи основано на следующем предположении: сила пропорциональная площади условного внедрения S жесткого обода катка в плоскость при вертикальном смещении центра катка δ.
| Внедрение колеса в плоскость |
 |
Взаимодействие ведущего колеса с цевкой
Контактное взаимодействие цевки с зубьями ведущего колеса передает тяговые и тормозные моменты на гусеницу. Используется модель податливого контакта для расчета этого взаимодействия. Контактная сила зависит от глубины взаимного внедрения точных профилей цевки и зуба и имеет две компоненты: нормальную силу N и силу трения F.
| Взаимодействие ведущего колеса с цевкой |
|
|
Взаимодействие трака с грунтом
Для расчета сил взаимодействия траков с грунтом используется модель Беккера
|
|
| Пример зависимости силы взаимодействия трака с грунтом от величины просадки |
Динамические тесты
Моделирование динамики гусеничных машин в UM основано на системе тестов:
- равновесие
- натяжение гусеницы,
- расчет начальных скоростей,
- вертикальная гармоническая нагрузка,
- движение по прямой,
- управление без обратной связи,
- тесты с водителем.
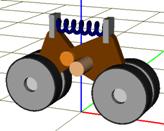
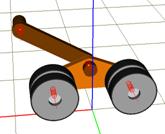
| Моделирования прыжка транспортера |
|
|
Тесты разделены на две группы: вспомогательные и основные (три последних теста в списке). Вспомогательные тесты предназначены для расчета начального состояния гусеничных машин и для подготовки основных тестов. Основные тесты используются для анализа динамических свойств гусеничных машин.
При выполнении основных тестов используются неровности поверхности и препятствия различных типов. Например, на рисунке вверху показан тест прямолинейного движения гусеничной машины с прыжком. В случае тестов с водителем гусеничная машина движется по заданным криволинейным маршрутам, в том числе по полигонам с заданным набором препятствий. Полигон создается в одном из САПР (КОМПАС. SolidWorks, Autodesk Inventor, PRO/E, Unigraphics и т.д.) и импортируется в UM.
Руководство пользователя / презентация
Руководство пользователя и презентация для этого модуля доступны на странице загрузки.

{kind=link}
{kind=link}
{kind=link}
{kind=link}