Модуль UM Drilling и инженерное приложение UM Drillstring Analysis
Описание функционала и областей применения инструментов анализа бурильной колонны, реализованных в модуле UM Drilling и инженерном приложении UM Drillstring Analysis.
Презентация по новому полностью переработанному инструменту UM Loco/Rail Profile Wear Evolution предназначенному для прогнозирования износа профилей ж.-д. рельсов.
В настоящее время программный комплекс (ПК) RobSim используется
в следующих направлениях:
– обучение операторов мобильных роботов, используемых
в системе госкорпорации "Росатом" и
смежных организаций, основным навыкам работы с ними, отработка типовых манипуляций; – оперативное создание сцен для отработки
технологии ликвидации последствий чрезвычайных происшествий с
использованием мобильных роботов.
ПК RobSim даёт возможность новичку освоить
основные приемы управления работами на виртуальной сцене. Его
использование позволяет существенно ускорить и обезопасить процесс
обучения, что, в конечном итоге, существенно сокращает общие затраты.
Развитая вычислительная техника и методы математического моделирования
обеспечивают возможность для создания комплексов, позволяющих
моделировать движение робота и его взаимодействие с элементами сцены с
приемлемой правдоподобностью.
ПК RobSim включает несколько
заранее подготовленных сцен и роботов. Кроме того, пользователь имеет
возможность разрабатывать собственные модели сцен и роботов. Актуальная на настоящий момент версия программного комплекса RobSim– 5.0.
Описание логической структуры программного комплекса
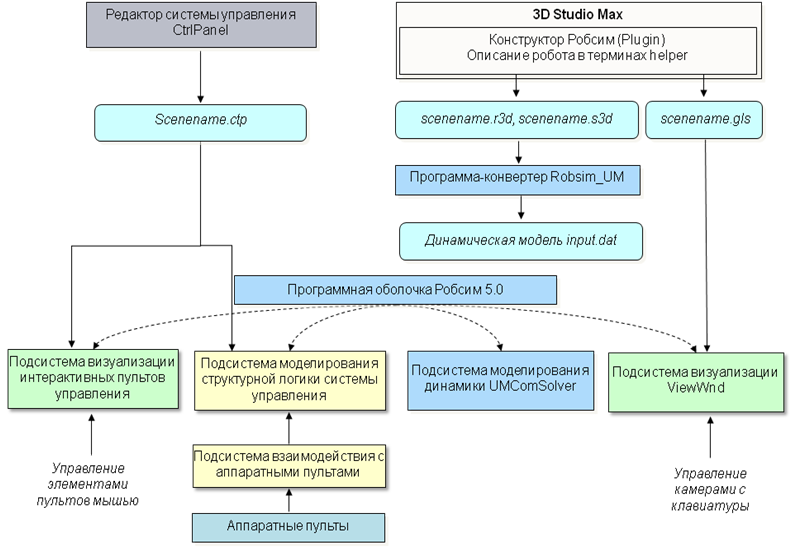
Программный комплекс RobSim 5 состоит из следующих компонентов.
Программная оболочка Robsim5.exe. Оболочка представляет
собой интерфейс пользователя для выбора сцен и роботов, участвующих в
симуляции, c последующим запуском режима тренировки. Оболочка
загружает модуль моделирования системы управления CtrlPanelDll.dll, подсистемы моделирования динамики UMCOMSolver.dll и визуализации
виртуальных сцен ViewWnd.dll и обеспечивает централизованный
обмен данными между этими подсистемами в процессе тренировки. В режиме тренировки
обеспечивается возможность конфигурирования рабочего пространства в виде полиэкранного
представления – в отдельных портах области вывода отображаются разные
средства наблюдения и пульты робототехнической системы. Обеспечивается загрузка
различных конфигураций.
Подсистема моделирования системы управления CtrlPanelDll.dll предназначена для моделирования структурной логики и пультов систем управления
робототехнических средств и манипуляторов. Обеспечивает загрузку файлов системы
управления формата ctp, визуализацию и интерактивное
управление элементами виртуальных пультов с помощью манипулятора мыши,
а также расчет структурных схем системы управления в реальном
режиме времени. Результаты расчета системы управления передаются в
модуль расчета динамики через программную оболочку в виде сигналов
двигателей.
Подсистема моделирования динамики UMComSolver.dll предназначена
для моделирования динамики сцен в реальном режиме. Программная оболочка конвертирует
сцены и роботы из файлов s3d и r3d в формат
подсистемы моделирования динамики dat. Моделируемые
динамические элементы включают тела, шарниры, аппроксимирующие
контактные контейнеры, линейные и вращательные двигатели и повторители,
колеса с разными типами подвесок, сменный инструмент, пружины,
дифференциалы, датчики столкновений и т.д. В результате расчета динамики
формируются данные о положении и ориентации элементов сцены и робота,
которые далее передаются в систему визуализации через программную
оболочку.
Подсистема визуализации виртуальных сцен ViewWnd.dll
предназначена для высококачественной визуализации виртуальных
трехмерных сцен в реальном режиме времени. Модуль визуализации
осуществляет загрузку сцен формата gls,
экспортированных из системы трехмерного моделирования 3ds Max и обеспечивает их визуализацию с максимально возможным соответствием исходному
виду в системе моделирования. Подсистема поддерживает визуализацию поверхностей
со сложными материалами, включающими текстуры отражения, прозрачности и рельефа;
позволяет моделировать сложное попиксельное освещение на основе технологии
шейдеров. Модуль имеет возможность синтеза изображения в нескольких конфигурируемых
портах с разными средствами наблюдения; а также позволяет проводить визуализацию
виртуальных сцен в стереорежиме с использованием различных технологий стереоотображения.
Управление элементами и параметрами сцены осуществляется с помощью набора
интерфейсных функций динамической библиотеки.
Программа CtrlPanel.exe, входящая в состав программного
комплекса, предназначена для описания систем управления роботов и сцен.
Разработанные системы управления записываются в файлы ctp, которые в режиме тренировки загружаются и обрабатываются подсистемой моделирования системы управления.
Создание моделей сцен и роботов выполняется в программе 3ds Max. Поддерживаются следующие версии 3ds Max: 5.0, 7.0,
9.0 и 2009. Для этого программного комплекса специально разработан
плагин, который дает возможность назначения для объектов их
математических моделей, а также возможность экспорта этих моделей в
специальном формате r3d для роботов и s3d для сцен для последующей загрузки в ПК RobSim.
Используемые технические средства, вызов и загрузка
ПК RobSim 5 выполняется под управлением
операционных систем Microsoft Windows XP/Vista/7. ПК RobSim 5 распространяется в виде инсталляционного пакета, который
после интерактивной установки развертывает все компоненты программного комплекса.
Инсталляционный пакет выполняет все действия по регистрации компонентов комплекса
в операционной системе и в программе 3ds Max.
Инсталляционный пакет устанавливает все настройки программного комплекса
по умолчанию, дополнительных обязательных действий после установки не
требуется.
Для вызова ПК RobSim 5 запустите файл RobSim5.exe в каталоге menu. Для запуска Редактора системы управления
запустите файл CtrlPanel.exe из каталога
ctrlpanel.
Входные данные
Исходными данными для программного комплекса являются модели сцен
и роботов, созданные в среде 3dsMax, имеющие расширение max. Специальный плагин для 3dsMax, поставляемый вместе с ПК RobSim 5 экспортирует эти данные в специальном формате r3d для роботов и s3d для сцен для последующей загрузки в
RobSim. Отдельный плагин экспортирует данные для
последующей визуализации в формате gls. Пульты
управления сценами и роботами создаются в Редакторе системы управления и сохраняются в ctp-файлах.